We are thrilled to announce that our paper on a smooth representation of belief over SO(3) for deep rotation learning will be presented at Robotics: Science and Systems 2020. This work was a collaboration between STARS lab members Valentin (now alumni!) and Matthew, together with Prof. Nicholas Roy, W. Nicholas Greene and Dr. David M. Rosen at MIT. Watch the 5 minute video summary below!
Author Archives: Valentin Peretroukhin
A Successful Debates Workshop at ICRA 2020!
Several STARS lab members helped organize the Debates on the Future of Robotics Research workshop that was held (virtually) on Friday, June 5th as part of ICRA (2020). The workshop live stream received over 1100 unique viewers and was enthusiastically received by both participants and viewers! Congratulations to STARS students (and alumni) Matthew Giamou, Valentin Peretroukhin and Lee Clement, as well as Prof. Kelly, who helped organize the event!

Valentin chosen to chair RSS Pioneers 2020!
Congratulations to Valentin who presented his research at the RSS Pioneers workshop in Freiburg, Germany, and was chosen as one of the General Chairs for the workshop at next year’s RSS!

Successful ‘Debates’ Workshop at ICRA 2019
Congratulations to Lee, Valentin, and Matt for organizing an incredibly successful ‘debates’ workshop at ICRA 2019. Many debates were standing-room-only and generated fantastic discussions!



New students in the STARS Lab!
A big welcome to four new Master’s students (Brandon, Oliver, Jordan, Trevor), and five new undergraduate thesis students (Christine, Johnny, Jennifer, Jason and Willie) who have joined STARS lab this September! Head over to our updated people page for bios and research blurbs.

Best Student Paper at MFI 2016 & Travel Award to ISER 2016!
Congratulations to Jacob Lambert (along with his co-authors Lee Clement, Matthew Giamou, and Jonathan) for winning the Best Student Paper at the 2016 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems in Baded-Baden, Germany!
Lee Clement was also awarded a travel award to the 2016 International Symposium of Experimental Robotics in Tokyo, Japan where he is presenting a paper on improving visual odometry through sun detection. Congrats Lee and Jacob!
STARS at RSS 2016
This weekend we drove over to the lovely University of Michigan campus to attend the workshops at RSS 2016. During the daytime, we listened to several heated exchanges about the future of hyper-parametric function approximation (i.e. Deep Learning) in robotics. During the night, we spent some time arguing over the best local Michigan brews. A great time all-around!

Lee and Valentin at RSS 2016.

The Deep Learning workshop at RSS 2016.
A successful ICRA 2016 presentation for Valentin
Valentin presented his work on PROBE-GK: Predictive Robust Estimation using Generalized Kernels (in collaboration with the MIT RRG including Will Vega-Brown) at ICRA 2016 in Stockholm. A great turn out for the 3-minute spotlight talk, and lots of great questions at the interactive poster!
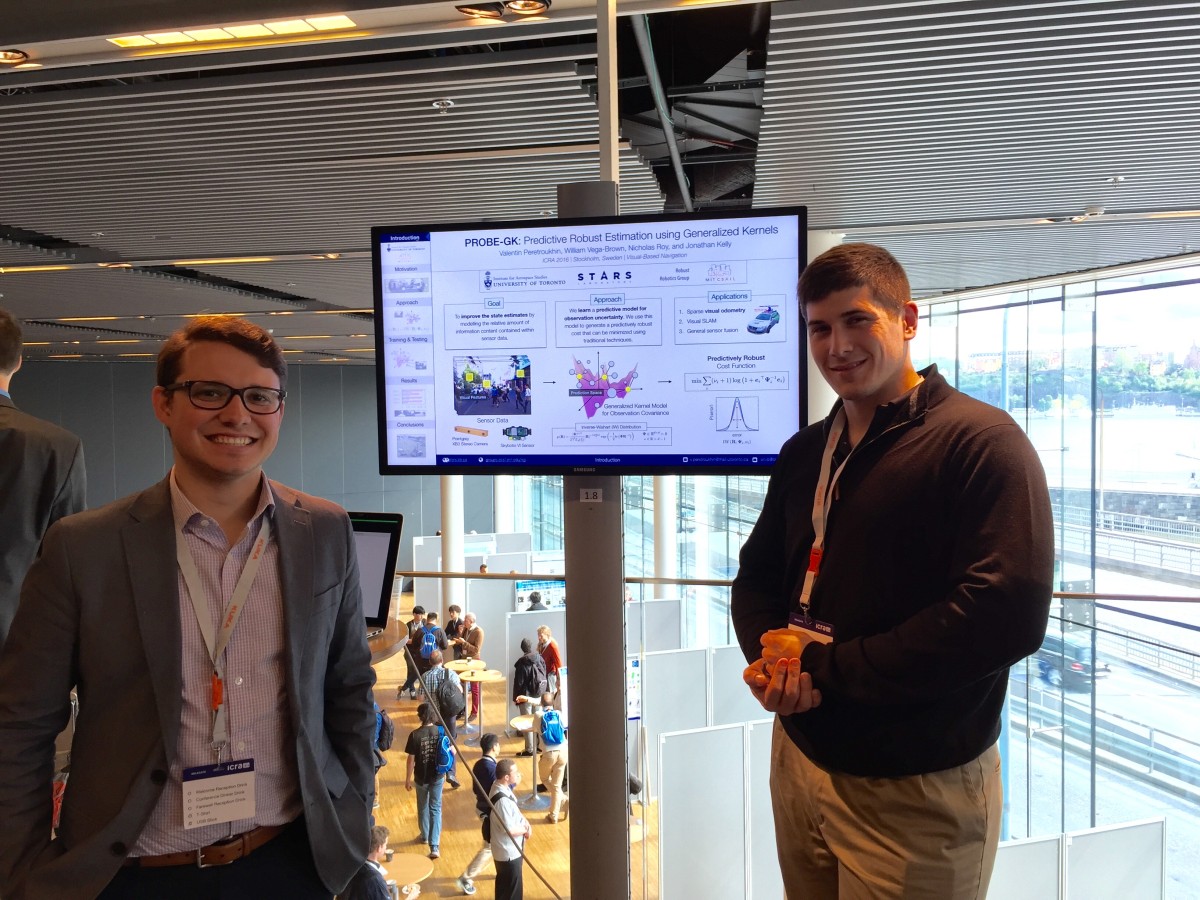
Valentin and Will (from Nick Roy’s group at MIT) at ICRA 2016.
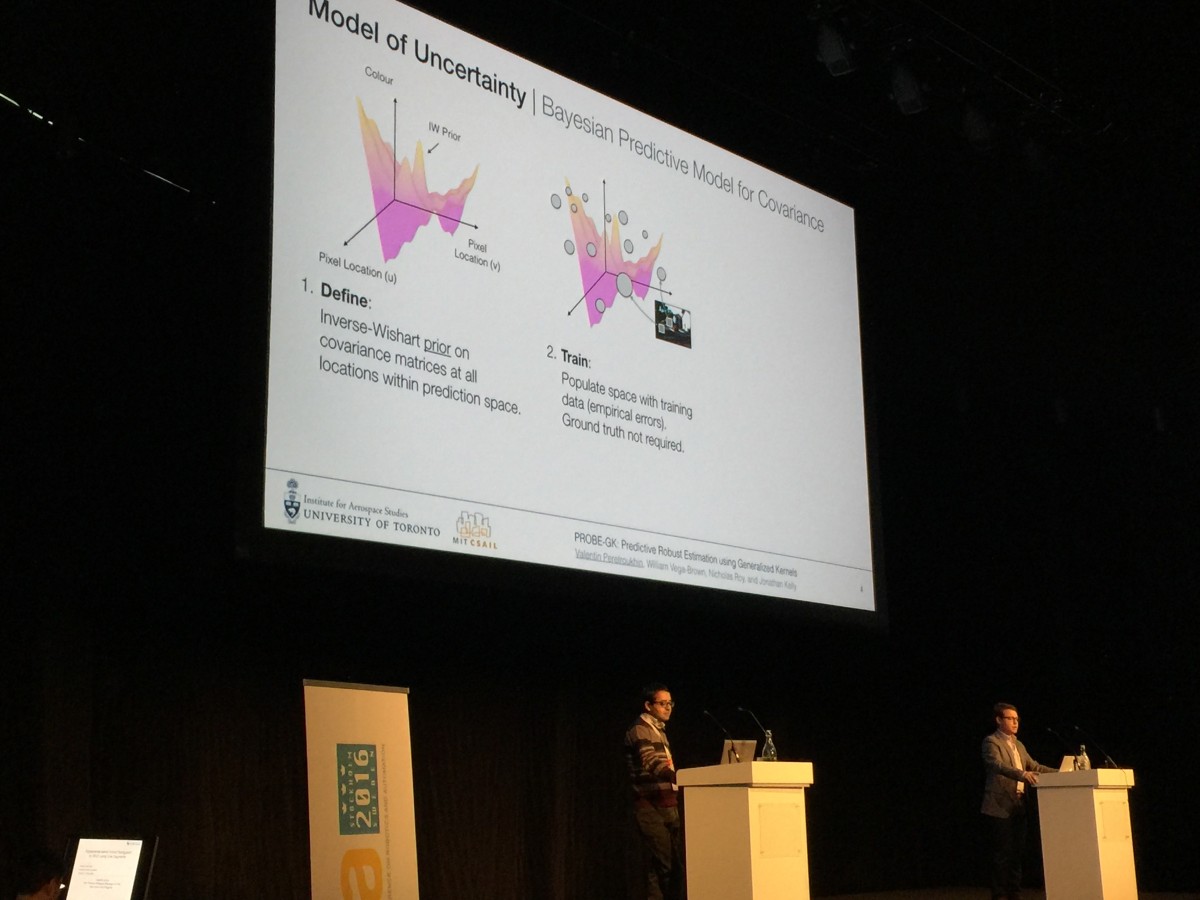
Valentin presenting in the Visual-Based Navigation session.
Congratulations Lee and Valentin on NSERC scholarships!
Congratulations to Lee and Valentin on receiving prestigious NSERC scholarships from the Government of Canada. Lee received the PGS-D3 and Valentin received the CGS-D3. Both excellent results!
Congratulations to Valentin and Lingzhu on IROS presentations!
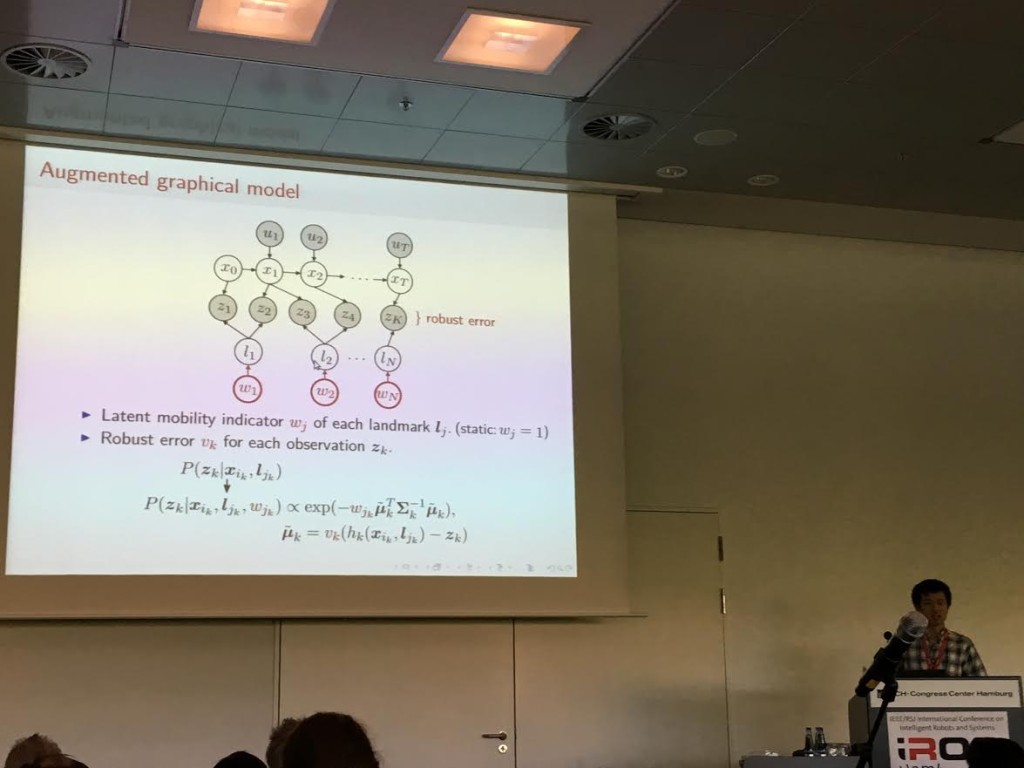
Congratulations to Valentin and Lingzhu on their well-attended presentations at the International Conference on Intelligent Robots and Systems 2015 in Hamburg!
Lingzhu’s presentation on robust SLAM.

Valentin’s IROS presentation on PROBE.